

















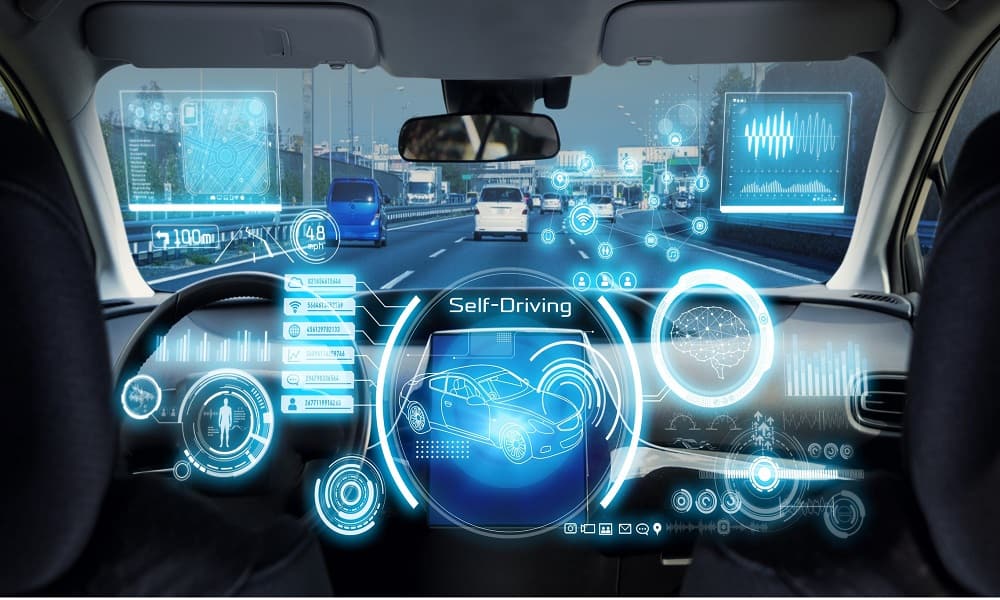
Driverless cars have become a phenomenon these days. Well, from the developments that are taking place in this arena, it will be only fair to say that this version of the technology is not limited to movies or creative imagination, but beyond that. Let us have a peep into the technology they work on and the components they are made up of. Broadly speaking, we can characterize the main components of the autonomous vehicle into hardware and software. Hardware components mainly comprise of sensors, vehicle-to-vehicle (V2V), actuators and vehicle-to-infrastructure (V2I). Software is more about the processes pertaining to perception, planning and control. These are mostly referred to as the brain of the driverless vehicle which instructs the hardware to perform desired functions.
The hardware components used in these autonomous vehicles (as they are mostly referred to these days) enable cars to complete tasks such as seeing through sensors, communicating through V2V & V2I technology, and moving through actuators.
Sensors
These are components that take up raw information about the environment and help the car understand what exactly is taking place in the surroundings. The main sensors that happen to be a part of the driverless car are GPS or Inertial Measurement Unit- IMU, Camera, Light Detection and Ranging-LiDar and Radar. LiDar comes handy in various types of ambient light where cameras might not work out well. Hence, most autonomous cars combine the readings of multiple sensors and complement each other. The process is also known as sensor fusion.
V2V & V2I Technology
These components of the autonomous car help to share information from other agents in the environment. Examples can range from taking information from the city light that it has turned green or even warnings from an oncoming car. This technology is as good as one’s ears and mouth where frequent communication with the external environment makes sure that the vehicle is running as per the plan and path.
Actuators
These are the components which are responsible for controlling and moving of the system. They work on the signals received from other components and make their decisions accordingly and also help the vehicle to function in the manner that it should.
Besides these hardware components, there are software components that basically can be termed as the brain of the vehicle. These components process information about the environment so that the car understands the need for what action to take i.e. whether to move or stop or slow down. The software functions are programmed with pre-fed information which helps in the performance of the vehicle as per the given guidelines.
Perception
This system helps the vehicle to identify the raw information coming from the sensors means. It lets the car picture whether the oncoming object is a pedestrian, another vehicle or something else. According to the information that is received, automatic adjustments are made so as to make the experience completely flawless.
Planning
The planning system refers to the ability of the vehicle to make decisions in a given situation i.e. whether to stop, move or slow down. The planning system is a combination of the information received from sensors and V2V & V2I Technology. There are certain established policies such as navigation which are pre-fed in the system such as not to run over pedestrians, slowing down while approaching a stop sign, etc. The planning system also takes into account which action to take, whether to overtake another vehicle or how to reach the destination amongst many others.
Control
The control system pertains to the orders received from the planning system and converts them into actions. The control system in a way gets in touch with the hardware i.e. the actuator, gives it necessary inputs that lead to desired motions. For instance, an autonomous vehicle by seeing a pedestrian approach translates the knowledge into action by applying brakes.
The entire process of the way these vehicles function is not complex and it all boils down to how well the components go on to gel with each other. The crux of an autonomous car functioning as per the desired intention lies in the fact that how technologies & components i.e. hardware and software interact with each other and make the car intelligent enough to ply.











{kind=link}